I can see clearly now the rain is gone
I can see all obstacles in my way
Gone are the dark clouds that had me blind
It’s gonna be a bright (bright)
Bright (bright) sunshiny day.
Johnny Nash
The last few hundred feet of an instrument approach require 2 things from a helicopter pilot: a sensitive touch – no surprise there – but also a thorough knowledge of the aircraft’s flight control avionics
Many a pilot has been thankful to become visual at the bottom of an instrument approach – breaking into a bright sunshiny day as if the heavens have been parted just for your landing. However, instrument approaches to minima do not always result in this rapid change to perfect conditions.
A Sikorsky S-92 helicopter in Canada found itself in poor visibility and cloud on the way to an oil rig in July 2019 and was required to do an instrument approach to get visual1. The crew had over 5,000 flying hours each, over 2,000 flying hours on the S92 and had received military helicopter training at the beginning of their careers. They belonged to a large company that had extensive experience in offshore operations.
The crew attempted 2 offshore airborne radar approach procedures without getting visual with the oil rig. Partway through the second missed approach, the crew noticed they could now see the oil rig and decided to do an abbreviated visual approach. A quick turnaround was conducted. There was fog beneath them and scattered to broken cloud above them and the ocean was visible directly below through the fog.
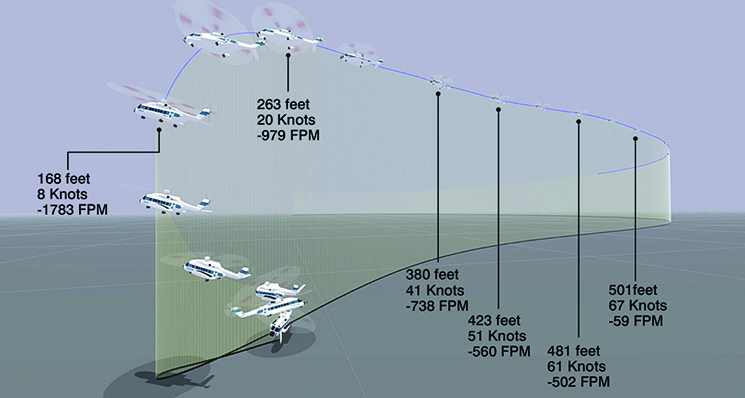
At half a mile from the oil rig, the crew disconnected airspeed hold, heading hold and RADALT hold and started hand flying the helicopter. The flying pilot was holding the force trim release (FTR) button in. Descent was started and it was noted that the approach was steeper than normal. Airspeed was a little high and up to 17 deg nose up was used to slow the helicopter on the descent. The rate of descent started to increase and at 250 feet was 1200 fpm with a lateral sideslip starting to develop. Changes in aircraft pitch and angle of bank occurred and progressively more sideslip occurred.
At 40 feet, the tail rotor no longer had enough authority to counter the rotor torque and the helicopter started spinning.
The helicopter descended through the height of the helideck with 1800 fpm and entered fog. The non-flying pilot realised the developing situation and puts his hands on the controls to level the helicopter in anticipation of water impact. At 70 feet the collective was raised to 146 per cent, the rotor RPM decreased, and the low rotor horn came on. At 40 feet, the tail rotor no longer had enough authority to counter the rotor torque and the helicopter started spinning, going through 845 deg over 55 seconds. Due to the low rotor RPM, the aircraft generators lost power, the automatic flight control system (AFCS) degraded and the primary flight displays went blank.
Somehow, while flying in cloud on the standby instruments, the pilots stopped the yaw, avoided the ocean, recovered rotor RPM and started climbing before heading back to shore and a safe landing.
Most accidents have more than one contributing factor in the chain of events that lead to their outcome. In this case there were several, including not completing the missed approach and a non-stabilised approach. In this article we are going to review the use of the AFCS in a poor useable cueing environment.
To fly to the absolute minima of an ILS requires not only radio aid and panel instrument guidance, but also ground-based visual aids associated with the landing threshold, approach lighting [high-intensity approach lighting (HIAL)] and glideslope guidance [precision approach path indicator (PAPI)]. The HIAL lines us up with the runway and the PAPI is aligned with the glideslope, so a continuous descent angle can be flown to the runway. There have been previous incidents where large aircraft at the bottom of an ILS have made a quick dart for the threshold and ended up landing short. The PAPI is meant to prevent this by giving the pilot continued glideslope guidance once past the decision altitude. Without HIAL and PAPI, increased minima are required.
Looking at a typical ILS approach plate, the minimum visibility can be down to 800 m. If we check the Aeronautical Information Publication, we will see that to utilise this low level of visibility, the HIAL must be working and, if not, the visibility must be increased to 1500 m.
Further, if the aircraft is not manually flown utilising a flight director or the aircraft is not flown by the autopilot coupled to the localiser and glidepath, then the visibility is increased to 1200 m even with HIAL. From these 2 points we can see that in low visibility conditions, the pilot must have extra guidance to line up on the runway when the visibility is less than 1500 m and extra help from aircraft systems to keep the aircraft stable when the visibility is less than 1200 m.
It should be clear now that in low-visibility conditions without good attitude and lateral cues, the pilot must rely on external horizontal and vertical guidance as well as automation to ensure the helicopter safely gets from the minima to having wheels on the runway.
Fixed-wing aircraft come down ILS finals and maintain a smooth constant flight path until touchdown. A small reduction in power once visual to reduce speed slightly to threshold speed is perhaps required. There aren’t any large changes in power or attitude until you flare onto the runway. Once on the runway, the earth holds the aeroplane upright using the undercarriage.
Helicopters don’t normally run on at high speed. The helicopter at the bottom of an ILS must transition to visual flight while decelerating to enable a hover, air taxi or a low-speed run on. How the helicopter is managed from the minima to safely taxiing requires some thought.
At minima there may be no visual horizon. Instead, you can see the runway approach lighting and maybe the PAPI through the mist. There will be very little and even confusing cues for the aircraft attitude. The helicopter is in a low visual cue environment. Utilisation of the AFCS and the correct modes is critical to reduce workload and keep the helicopter in controlled flight as it transitions from in cloud to a visual, low-speed run on or hovering landing. This is even more challenging than fixed-wing aircraft due to the greater changes in attitude and speed required in a helicopter.
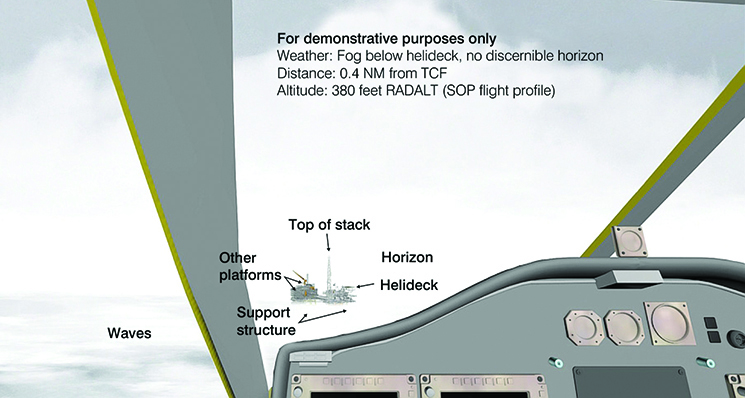
In this incident, the S-92 was doing an approach to an oil rig, without approach lighting and glideslope guidance. Figure 2, from the Canadian incident report, shows what the useable cueing environment might have been like.
Here we can see there are very few visual vertical cues to aid setting a pitch attitude and very few visual horizontal cues to indicate ground speed or lateral drift. Sideslip would also be difficult to detect. There are no lateral or vertical lights helping guide the helicopter on its approach path to the oil rig landing deck.
Remember earlier that the flying pilot was holding the FTR button in. The S-92 has an attitude hold system that will maintain the aircraft attitude – this does not function when the force trim is held in. A Canadian Air Force study found that pilots who utilise the attitude mode while minimising the use of the FTR had far better control in a degraded visual environment than those who attempt to fly with the FTR depressed. Those who fly with FTR depressed:
‘Often failed to interpret residual pitch or roll rates (or vertical velocities) due to the reduced cues and aircraft control suffered resulting in ineffective approaches or, in the worst case, ground impact.’
Operating in such low useable cue environments requires help for the pilot. On land we can have approach lighting to align ourselves and give us heading and drift cues. We can have PAPI to help us maintain glide path.
Rules prohibit the use of the autopilot or flight director when the useable cue environment – visibility – is really low. The flying pilot did not use the correct AFCS mode required for flight in the reduced visibility. Holding in the FTR disabled the attitude hold. The pilot should not have pushed in the FTR and instead should have used the upper modes of the AFCS longer before transitioning to hand flying, utilising the trim system to keep the attitude hold function engaged.
Comparing the requirements for an ILS, we can see there was no external guidance on azimuth or glideslope from the oil rig and the pilots were not using a flight director or the appropriate modes on the AFCS to reduce pilot workload. Because of the low useable cue environment, the pilots did not pick changes in attitude, sideslip, rate of descent or ground speed. This led to an excessive rate of descent which ultimately resulted in going into cloud very close to the ocean and losing control of the helicopter when applying a massive amount of collective to avoid hitting the ocean.
Helicopter pilots need to understand their aircraft’s AFCS. What does each mode enable and how is it meant to be used? Flying in low useable cue environments requires the use of upper modes for as long as possible and after this, use of the AFCS with at least attitude hold mode engaged.
Helicopter AFCS all have subtle differences; however, approaches in low useable cue environments should be flown slowly and deliberately, within the trim system’s rate capabilities to minimise the use of the FTR.
If the FTR is required, then it should be used quickly or momentarily and definitely not held in for extended periods of time. This will ensure that attitude hold is available to prevent excessive pilot workload and entering unusual attitudes or even losing control of the helicopter.
Flying modern helicopters requires a detailed understanding of AFCS and how to use them – without this knowledge, pilots should be only flying on bright (bright) sunshiny days.




Comments are closed.